6.2. Matrix Multiplication as Linear Transformation
As was shown in the last chapter with systems of equations, linear transformations can also be written in matrix form. If we take the linear function  from the previous chapter as an example (we'll call it
from the previous chapter as an example (we'll call it  here):
here):  :
: 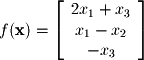 we can write this function as the multiplication
we can write this function as the multiplication  :
: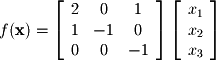 It is easy to verify that
It is easy to verify that  is equivalent to
is equivalent to  through matrix multiplication. Thus, multiplying any matrix by a vector is equivalent to performing a linear transformation on that vector. Thus, the matrix form is a very convenient way of representing linear functions.
through matrix multiplication. Thus, multiplying any matrix by a vector is equivalent to performing a linear transformation on that vector. Thus, the matrix form is a very convenient way of representing linear functions.
In addition to multiplying a transform matrix by a vector, matrices can be multiplied in order to carry out a function convolution. Consider another linear function :
:  If we convolve the two functions, it is easy to show (although it will not be done here) that the convolution is equivalent to the following:
If we convolve the two functions, it is easy to show (although it will not be done here) that the convolution is equivalent to the following: Keep in mind that since matrix multiplication is not commutative that the order of the multiplication is important. The grouping of the multiplication is not important since matrix multiplication is associative. In other words, you can perform
Keep in mind that since matrix multiplication is not commutative that the order of the multiplication is important. The grouping of the multiplication is not important since matrix multiplication is associative. In other words, you can perform  first or
first or  first and still get the same result. By doing the former you are essentially transforming the transform
first and still get the same result. By doing the former you are essentially transforming the transform  first and then transforming the vector
first and then transforming the vector  . In the latter you are transforming the vector
. In the latter you are transforming the vector  by
by  and then passing it to
and then passing it to  to be transformed again. These two operations are equivalent, but switching the multiplication so that
to be transformed again. These two operations are equivalent, but switching the multiplication so that  is transformed by
is transformed by  before
before  does not yield an equivalent result.
does not yield an equivalent result.
from the previous chapter as an example (we'll call it here): : : is equivalent to through matrix multiplication. Thus, multiplying any matrix by a vector is equivalent to performing a linear transformation on that vector. Thus, the matrix form is a very convenient way of representing linear functions.In addition to multiplying a transform matrix by a vector, matrices can be multiplied in order to carry out a function convolution. Consider another linear function
: first or first and still get the same result. By doing the former you are essentially transforming the transform first and then transforming the vector . In the latter you are transforming the vector by and then passing it to to be transformed again. These two operations are equivalent, but switching the multiplication so that is transformed by before does not yield an equivalent result.